图最短路径
最短路径问题一直是图论研究的热点问题。例如在实际生活中的路径规划、地图导航等领域有重要的应用。 关于求解图的最短路径方法也层出不穷,本篇文章将详细讲解图的最短路径经典算法。
重要概念
- 图的路径:图G =
中,从任一顶点开始,由边或弧的邻接至关系构成的有限长顶点序列称为路径。 - 注意:有向图的路径必须沿弧的方向构成顶点序列;构成路径的顶点可能重复出现(即允许反复绕圈)。
- 路径长度:路径中边或弧的数目。
- 简单路径:除第一个和最后一个顶点外,路径中无其它重复出现的顶点,称为简单路径。
- 回路或环:路径中的第一个顶点和最后一个顶点相同时,称为回路或环。
- 图的最短路径:如果从有向图中某一顶点(称为源点)到达另一顶点(称为终点)的路径可能不止一条,如何找到一条路径使得沿此路径上各边上的权值总和达到最小。
深度或广度优先搜索算法
算法概述
从起点开始访问所有深度遍历路径或广度优先路径,则到达终点节点的路径有多条,取其中路径权值最短的一条则为最短路径。
算法流程
- 选择单源的起点作为遍历的起始点。
- 采用深度优先搜索或者广度优先搜索的方式遍历图,在遍历同时记录可以到达终点的路径。
- 在所有路径中选择距离最短的路径。
实例图解
例如:下图所示的有向图中,选取A为源点,D为终点,采用遍历的方式获取最短路径。
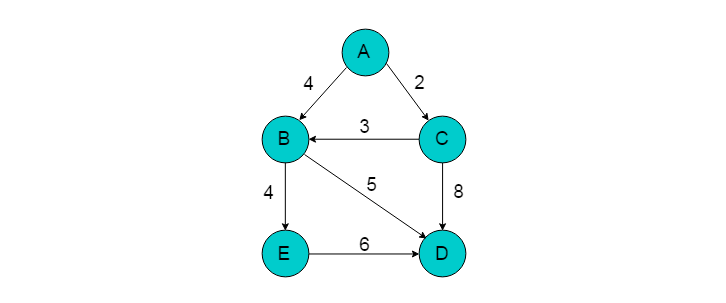
- 选择A为遍历起始点,D为终点。
采用遍历的方式获取A到D路径。通过遍历方式得到的路径共有5条。
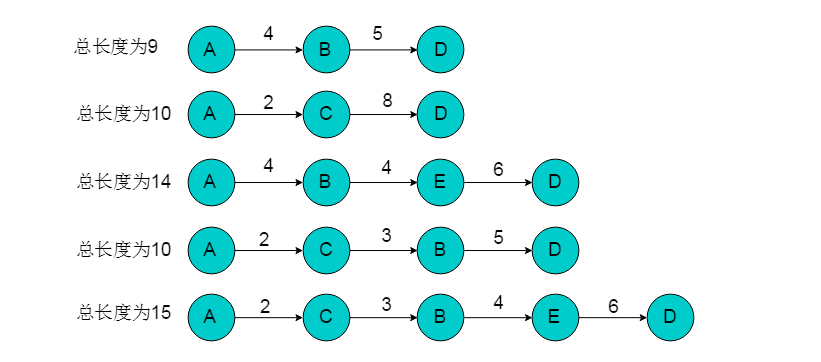
从中选择距离最短的路径为A->B->D,长度为9。
算法分析
采用遍历的方式获取单源最短路径,是一种暴力破解的方式。算法的性能与遍历过程性能相关。采用深度优先搜索遍历时时间复杂度为O(n+e)。
迪杰斯特拉(Dijkstra)算法
算法概述
Dijkstra(迪杰斯特拉)算法是典型的单源最短路径算法,用于计算某个顶点到其他所有顶点的最短路径。Dijkstra(迪杰斯特拉)算法要求图中不存在负权边,即保证图中每条边的权重值为正。 算法的基本思想是:从源点出发,每次选择离源点最近的一个顶点前进,然后以该顶点为中心进行扩展,最终得到源点到其余所有点的最短路径。
算法流程
- 将所有的顶点分为两部分:已知最短路程的顶点集合P和未知最短路径的顶点集合Q。最开始,已知最短路径的顶点集合P中只有源点s一个顶点。我们这里用一个book[i]数组来记录哪些点在集合P中。例如对于某个顶点i,如果book[i] = 1则表示这个顶点在集合P中,如果book[i] = 0则表示这个顶点在集合Q中。
- 设置源点s到自己的最短路径为0即dist = 0。若存在源点有能直接到达的顶点i,则把dist[i]设为e[s][i]。同时把所有其它(即源点不能直接到达的)顶点的最短路径为设为∞。
- 在Q中选择一个离源点s最近的顶点u(即dist[u]最小)加入到P中。并考察所有以点u为起点的边,对每一条边进行松弛操作。
- 重复第3步,如果集合Q为空,算法结束。最终dist数组中的值就是源点到所有顶点的最短路径。
实例图解
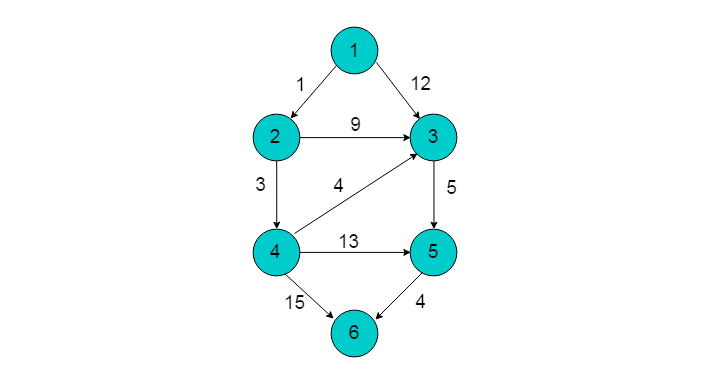
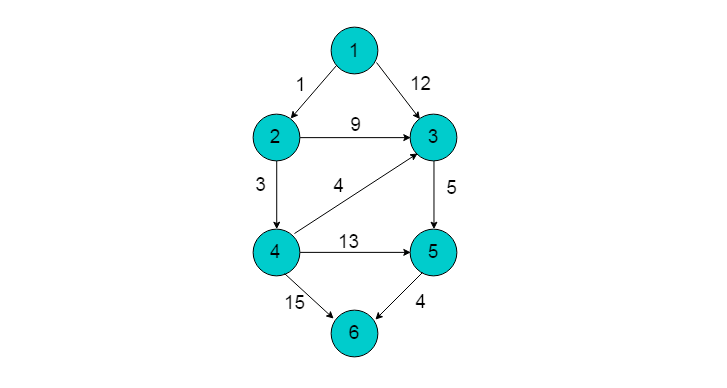
例如:下图所示的有向图,以顶点1为源点,运用Dijkstra算法,获得最短路径。
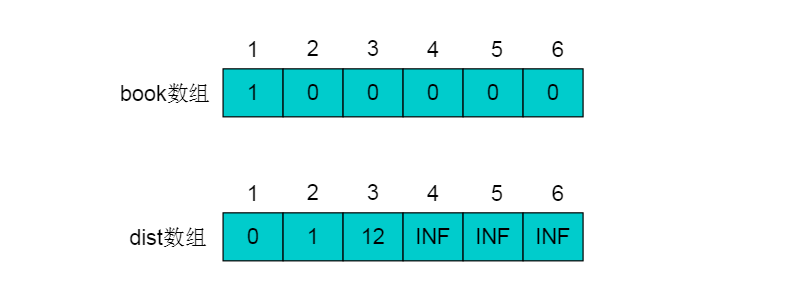
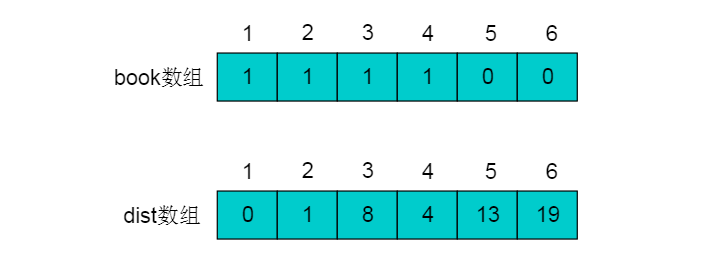
初始状态下,集合P中只有顶点1, book[1]=1。book数组以及dist数组如图:
从dist数组中可以看出,距离顶点1最近的顶点为2,不存在可以中转的顶点使得顶点1到顶点2的距离更短,且顶点2不在集合P中。 因此,选择顶点2加入集合P中,令book[2]=1。顶点2加入后,需要考虑经过顶点2进行中转,使得顶点1到达其余顶点的距离发生改变。 顶点2的出边有<2,3>和<2,4>。 则需重新计算dist[3]和dist[4]。dist[3] = dis[2]+e[2][3] = 10 < 12,令dist[3]松弛为10。dist[4] = dis[2]+e[2][4] = 4 < INF,令dist[4]松弛为4。 更新后的book数组和dist数组如下:

从剩余顶点3、4、5、6中选择dist中最近顶点为顶点4(因为顶点2已经在集合P中不能再次选择)。 将顶点4加入集合P中,令book[4]=1。按照相同的方式更新dist数组。顶点4的所有出边<4,3>(dist[3] = dis[4]+e[4][3]),<4,5>(dist[5] = dis[4]+e[4][5])和<4,6>(dist[6] = dis[4]+e[4][6])用同样的方法进行松弛。 松弛完毕之后book数组和dist数组为:

继续在剩余的顶点3、顶点5顶点和6中,选出离顶点1最近的顶点。选择3号顶点。 此时,dis[3]的值已对3号顶点的所有出边(3->5)(dist[5] = dis[3]+e[3][5])进行松弛。松弛完毕之后dist数组为:
继续在剩余的顶点5和顶点6,选出离顶点1最近的顶点,选择5号顶点。对5号顶点的所有出边(5->4)(dist[4] = dis[5]+e[5][4])进行松弛。 松弛完毕之后dist数组为:

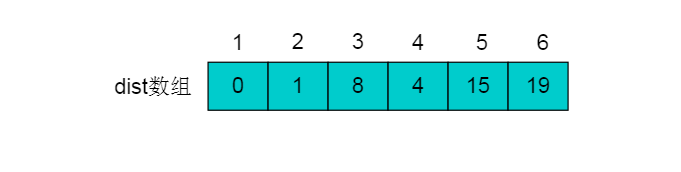
最后选择顶点6加入集合P,令book[6]=1。由于6号顶点没有出边,因此不用进行松弛处理。 最终得到的dist数组如下:
算法分析
复杂度
迪杰斯特拉(Dijkstra)算法适用于权值为非负的图的单源最短路径, 使用最小堆时间复杂度是O(VLogV),用斐波那契堆的复杂度O(E+VlgV)。
为什么不能有负权边
Dijkstra算法当中将节点分为已求得最短路径的集合(记为P)和未确定最短路径的个集合(记为Q), 归入P集合的节点的最短路径及其长度不再变更,如果边上的权值允许为负值,那么有可能出现当与P内某点(记为a)以负边相连的点(记为b)确定其最短路径时, 它的最短路径长度加上这条负边的权值结果小于a原先确定的最短路径长度(意思是原先从a0---a已经确定一个最短路径,而此时的边权值为负, 则此步骤中的边权计算结果必定小于已经确定了的路径长度),但是a在Dijkstra算法下是无法更新的,由此便可能得不到正确的结果。
Bellman-Ford算法
算法概述
Bellman-Ford算法是从Dijkstra算法算法引申出来的,它可以解决带有负权边的最短路径问题。值得注意的是,Dijkstra算法和下面的Floyd算法是基于邻接矩阵的,而Bellman-Ford算法是基于邻接表,从边的角度考量的。 用一句话概括就是:对所有的边进行n-1次松弛操作。如果图中存在最短路径(即不存在负权回路),那么最短路径所包含的边最多为n-1条,也就是不可能包含回路。因为如果存在正回路,该路径就不是最短的,而如果存在负回路,就压根就不存在所谓的最短路径。
算法流程
- 从源点到任意一点u的最短路径的长度,初始化数组dist[u]为0,其余dist[i]为无穷大。
- 以下操作循环执行至多n-1次,n为顶点数:对于每一条边edge(u,v),如果dist[u] + weight(u,v) < dist[v],则令dist[v] = dist[u] + weight(u,v)。若上述操作没有对dist进行更新,说明最短路径已经查找完毕,或者部分点不可达,跳出循环。否则执行下次循环;
- 检测图中是否存在负环路,即权值之和小于0的环路。对于每一条边edge(u,v),如果存在dist[u] + weight(u,v) < dist[v]的边,则图中存在负环路,即是说该图无法求出单源最短路径。否则数组dist[n]中记录的就是源点s到各顶点的最短路径长度。
实例图解
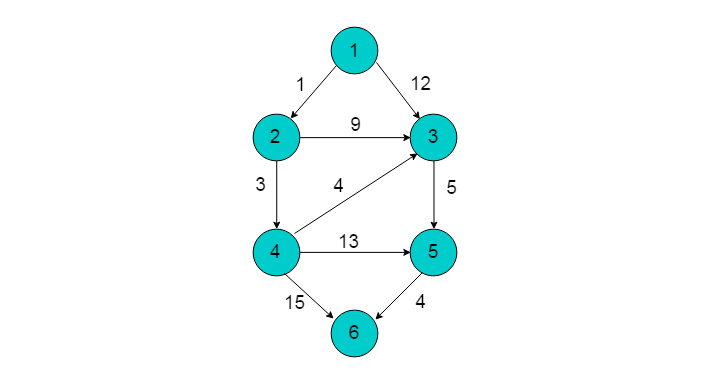
以下图所示的有向图为例,以顶点1为源点,采用Bellman-Ford算法计算最短路径。
- 选取顶点1为源点,令dist[1]=1,dist[2]-dist[6]=INF。
- 图中共有9条边,分别为<1,2>,<1,3>,<2,3>,<2,4>,<3,5>,<4,3>,<4,5>,<4,6>,<5,6>。对于每一条边执行松弛操作。此过程至多执行5次。
- 第一次松弛操作:
对于边<1,2>,dist[2]=dist[1]+weight[1,2]=1 <INF。则dist[2]=1;
对于边<1,3>,dist[3]=dist[1]+weight[1,3]=12<INF。则dist[3]=12;
对于边<2,3>,dist[3]=dist[2]+weight[2,3]=10<12。则dist[3]=10;
对于边<2,4>,dist[4]=dist[2]+weight[2,4]=4<INF。则dist[4]=4;
对于边<3,5>,dist[5]=dist[3]+weight[3,5]=15<INF。则dist[5]=15;
对于边<4,3>,dist[3]=dist[4]+weight[4,3]=8<10。则dist[3]=8;
对于边<4,5>,dist[5]=dist[4]+weight[4,5]=17>15。则dist[5]=15;
对于边<4,6>,dist[6]=dist[4]+weight[4,6]=19<INF。则dist[6]=19;
对于边<5,6>,dist[6]=dist[5]+weight[5,6]=19<INF。则dist[6]=19;
得到的dist数组为:
- 第二次松弛操作:
对于边<1,2>,dist[2]=dist[1]+weight[1,2]=1=1。则dist[2]=1;
对于边<1,3>,dist[3]=dist[1]+weight[1,3]=12=12。则dist[3]=12;
对于边<2,3>,dist[3]=dist[2]+weight[2,3]=10>8。则dist[3]=8;
对于边<2,4>,dist[4]=dist[2]+weight[2,4]=4=4。则dist[4]=4;
对于边<3,5>,dist[5]=dist[3]+weight[3,5]=13<15。则dist[5]=13;
对于边<4,3>,dist[3]=dist[4]+weight[4,3]=8<10。则dist[3]=8;
对于边<4,5>,dist[5]=dist[4]+weight[4,5]=17>13。则dist[5]=13;
对于边<4,6>,dist[6]=dist[4]+weight[4,6]=19=19。则dist[6]=19;
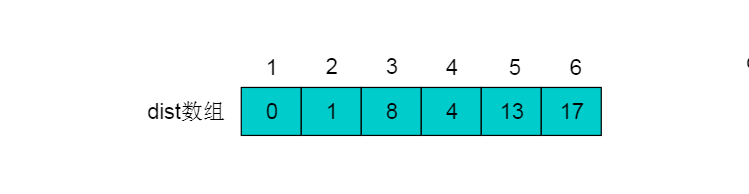
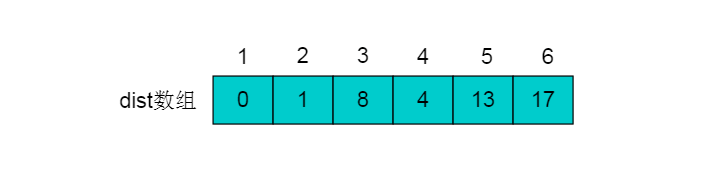
对于边<5,6>,dist[6]=dist[5]+weight[5,6]=17<19。则dist[6]=17;
得到的dist数组为:
5.第三次松弛操作:
对于边<1,2>,dist[2]=dist[1]+weight[1,2]=1=1。则dist[2]=1;
对于边<1,3>,dist[3]=dist[1]+weight[1,3]=12=12。则dist[3]=12;
对于边<2,3>,dist[3]=dist[2]+weight[2,3]=10>8。则dist[3]=8;
对于边<2,4>,dist[4]=dist[2]+weight[2,4]=4=4。则dist[4]=4;
对于边<3,5>,dist[5]=dist[3]+weight[3,5]=13<15。则dist[5]=13;
对于边<4,3>,dist[3]=dist[4]+weight[4,3]=8<10。则dist[3]=8;
对于边<4,5>,dist[5]=dist[4]+weight[4,5]=17>13。则dist[5]=13;
对于边<4,6>,dist[6]=dist[4]+weight[4,6]=19=19。则dist[6]=19;
对于边<5,6>,dist[6]=dist[5]+weight[5,6]=17<19。则dist[6]=17;
得到的dist数组为:
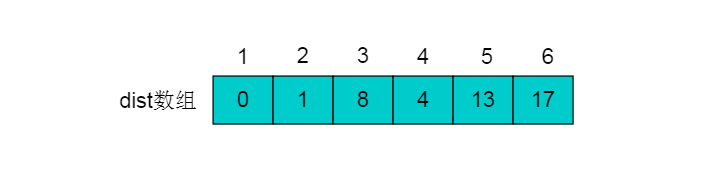
6.第三次松弛操作没有对dist进行更新,说明最短路径已经查找完毕。最终结果为:

算法分析
Bellman-Ford算法初始化过程时间复杂度为O(V),对边进行了V-1趟操作,每趟操作的运行时间为O(E)。整体的时间复杂度为O(V*E)
SPFA算法
SPFA(Shortest Path Faster Algorithm)算法是求单源最短路径的一种算法,它是Bellman-ford的队列优化。
算法流程
- 初始化:选取顶点u为源点,令dist[u]=0,其余赋值为INF。并将源点入队列。
- 读取队列头的顶点,并将头顶点u出队列,将与u邻接的所有顶点v进行松弛,若v没有在队列中,则将邻接顶点v入队列。如果已经在队列中,则不再入队。
- 队列为空时,单源最短路径查找完毕。
实例图解
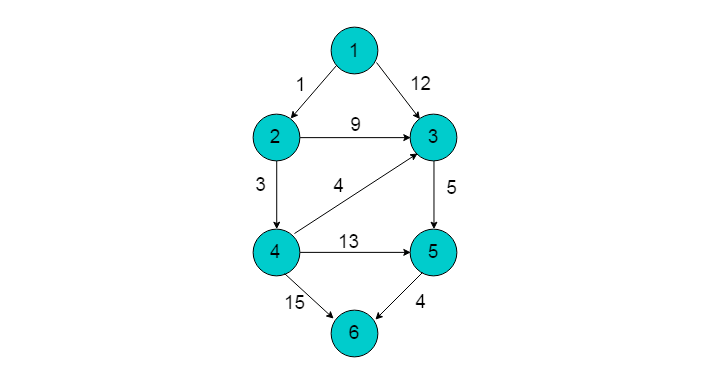
例如:下图所示有向图,以顶点1为源点,采用SPFA算法求解最短路径。
- 执行初始化操作,并将顶点1入队列。
- 顶点1出队列,邻接顶点有2、3。进行松弛操作:
- dist[2] = dist[1]+weight[1,2] = 1;
- dist[3] = dist[1]+weight[1,3] = 12;
- 更新dist数组,并将顶点2、3入队列。
- 顶点2出队列,邻接顶点有3、4,进行松弛操作:
- dist[3] = dist[2]+weight[2,3] = 10;
- dist[4] = dist[2]+weight[2,3] = 4;
- 更新dist数组,并将顶点4入队列(顶点3已在队列中)。
- 顶点3出队列,邻接顶点有5。进行松弛操作:
- dist[5] = dist[3]+weight[3,5] = 17;
- 更新dist数组,并将顶点5入队列。
- 顶点4出队列,邻接顶点有3、5、6。进行松弛操作:
- dist[3] = dist[4]+weight[4,3] = 8;
- dist[5] = dist[4]+weight[4,5] = 17;
- dist[6] = dist[4]+weight[4,6] = 19;
- 更新dist数组,并将顶点3、6入队列。
- 顶点5出队列,邻接顶点有6。进行松弛操作:
- dist[6] = dist[5]+weight[5,6] = 19 = 19;
- 无需更新dist中数组值,同时无元素入队列。
- 顶点3出队列,邻接顶点有5。进行松弛操作:
- dist[5] = dist[3]+weight[3,5] = 13;
- 更新dist数组,并将顶点5入队列。
- 顶点6出队列,无邻接顶点,无需松弛操作。无元素入队列。
- 顶点5出队列,邻接顶点有6。进行松弛操作:dist[6] = dist[5]+weight[5,6] = 17;更新dist中数组值,顶点6入队列。
- 顶点6出队列,无邻接顶点,无需松弛操作。无元素入队列。此时队列为空,求解过程结束。得到最终结果为:
算法分析
SPFA算法是Bellman-Ford算法的一种优化。Bellman-Ford算法的复杂度是O(ev),由于Bellman-Ford算法依次对每一条边进行松弛操作,重复n-1次后得到最短路径。SPFA算法中,如果一个顶点上没有被松弛过,那么下次就不会从这个点开始松弛。只将松弛过的点加入队列,减少了每个点的更新次数。
弗洛伊德(Floyd)算法
Floyd算法是一个经典的动态规划算法。其主要思想为:从任意顶点u到任意顶点v的最短路径不外乎2种可能,一是直接从u到v,二是从u经过若干个顶点k到v。所以,我们假设dist(u,v)为顶点u到顶点v的最短路径的距离,对于每一个顶点k,我们检查dist(u,k) + dist(k,v) < dist(u,v)是否成立,如果成立,证明从u到k再到v的路径比u直接到v的路径短,我们便设置dist(u,v) = dist(u,k) + dist(k,v),这样一来,当我们遍历完所有顶点k,dist(u,v)中记录的便是u到v的最短路径的距离。
算法流程
- 从任意一条单边路径开始。所有两点之间的距离是边的权,如果两点之间没有边相连,则权为无穷大。
- 对于每一对顶点u和v,看看是否存在一个顶点w使得从u到w再到v比己知的路径更短。如果是更新它。
实例图解
例如:下图所示的有向图采用Floyd算法求解最短路径。选取顶点1为源点,顶点3为终点。
- 选取单边路径为<1,3>,由于顶点1与顶点3距离为12。
- 遍历剩余顶点2、4、5、6,寻找是否有可以选做中间站的顶点,使得顶点1到顶点3路径小于12。
- 遍历完毕后,找到中间顶点2。选择顶点2位中间顶点,使得因此顶点1到顶点3最短路径为10。此时需要走的路径为(1,2),(2,3)。
- (1,2)边路径已经为最短路径,不存在中转顶点。遍历剩余顶点寻找(2,3)之间的中转顶点,发现通过顶点4可以使得1->3路径更短,路径长度为7。以此类推,逐逐步寻找最短路径。
例如:上图所示的有向图采用Floyd算法求解最短路径。选取顶点2为源点,顶点5为终点。 - 顶点2与顶点5不邻接,因此距离为INF
- 顶点2与顶点5可以通过顶点3中转,经过中转后距离为14。此时路径为2->3->5。
- 顶点2到顶点3又可以通过顶点4中转,经过转后顶点2至顶点5距离为12。此时路径为2->4->3->5。
算法分析
弗洛伊德(Floyd)算法的核心代码如下:
for(int i = 1; i <= n; i++)//枚举所有顶点,i代表顶点u
{
for(int j = 1; j <= n; j++)//枚举所有顶点,j代表顶点v
{
for(int k = 1; k <= n; k++)//查找是否有中间顶点w使得从u到w再到v比己知的路径更短
{
if(dist[j][k] > dist[j][i] + dist[i][k])
{
dist[j][k] = dist[j][i] + dist[i][k];
}
}
}
}
可以看出Floyd算法是一种暴力破解的方式获取最短路径。Floyd算法的时间复杂度为O(n^3),空间复杂度为O(n^2)。Floyd算法可以获得任意顶点对之间的最短路径。
结语
最短路径问题是图论研究中的一个经典算法问题。因此针对图最短路径问题先后提出了许多算法。各类算法的应用场景不尽相同。Dijkstra算法和Bellman-Ford算法用于解决单源最短路径,而Floyd算法可以解决多源最短路径。
Dijkstra算法适用稠密图(邻接矩阵),因为稠密图问题与顶点关系密切。Bellman-Ford算法算法适用稀疏图(邻接表),因为稀疏图问题与边关系密切。 Floyd算法在稠密图(邻接矩阵)和稀疏图(邻接表)中都可以使用。